Low-cost Experimental Setups for Mid-air 3D Reconstruction
Abstract
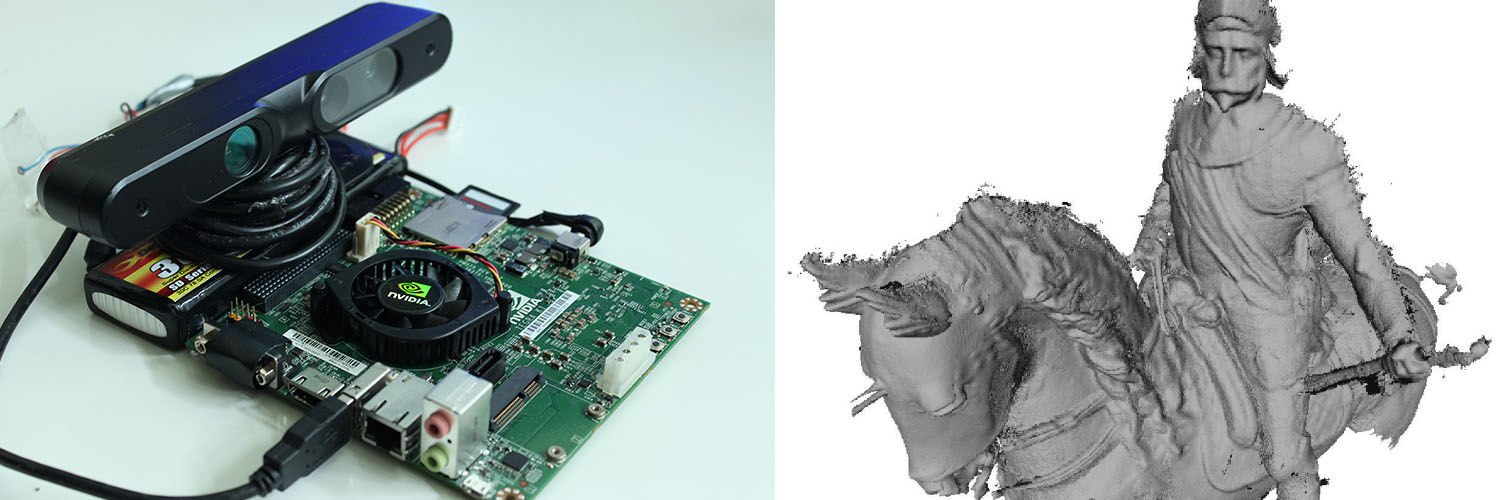
The reconstruction of the physical environment using a depth sensor involves data-intensive computations which are difficult to implement on mobile systems (e.g., tracking and aligning the position of the sensor with the depth maps). In this paper, we present two practical experimental setups for scanning and reconstructing real objects employing low-price, off-the-shelf embedded components and open-source libraries. As a test case, we scan and reconstruct a 23 m high statue using an octocopter without employing external hardware
Type
Publication
Smart Tools and Apps for Graphics (STAG) - Eurographics Italian Chapter Conference
Date
August, 2015
Links