A 3D simulator of multiple legged robots based on USARSim
Abstract
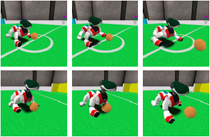
This paper presents a flexible 3D simulator able to reproduce the appearance and the dynamics of generic legged robots and objects in the environment at full frame rate (30 frames per second). Such a simulator extends and improves USARSim (Urban Search and Rescue Simulator), a robot simulator in turn based on the game platform Unreal Engine. This latter provides facilities for good quality rendering, physics simulation, networking, highly versatile scripting language and a powerful visual editor. Our simulator extends USARSim features by allowing for the simulation and control of legged robots and it introduces a multi-view functionality for multi-robot support. We successfully tested the simulator capabilities by mimicking a virtual environment with up to five network-controlled legged robots, like AIBO ERS-7 and QRIO.